Code¶
Here is the Arduino code. You can download the latest and the previous versions from here : Code Arduio. I’m not a professional programmer. The code is a bit messy/dirty sorry about that. At the begining I tried to use AccelStepper library for Arduino but couldn’t get it work well. (couldn’t reach an appropriate speeed I don’t know why) so I remove AccelStepper library and tried to do something and it worked not badly. The code are named: CodeGeckoVx.ino. But after that a few person ask me to remove the jump of speed at 90% of the speed knob and to improve the moves when heavy dildos are used around 2kg, I made another version using the library accelStepper. The speed isn’t so high as the original one (CodeGeckoVx.ino) but it afford more reliability when the move change direction (espacielly with big loads). That code is called CodeGeckoAccelStepVx.ino. Find the latest code underneath. Sorry the comments in the code are in french, I’ll translate them soon!
Maybe this video can help to understand the code
CodeGeckoV5.ino¶
// CodeGeckoV5.ino
// V4->V5 course_min a été mis à 296 au lieu de 380 permet peut-être d'avoir un meilleure vibro
// V3 -> V4 Elimine le full stroke quand on débranche la Télécommande en pleine action.
// Comme le fait de lire la vitesse du potentiomètre prend relativement beaucoup de temps,
// cela réduit la vitesse de pulsation de la pin 9. Pour parer à ceci le programme a été adapté
// pour lire la vitesse tous les 300 itérations à basse vitesse.
// Lorsque la vitesse du potentiomètre dépasse v_max_inv qui est la vitesse maximale à laquelle
// le moteur ne décroche pas à l'inversion du sens de rotation, des boucles d'accélérations et de
// décélération sont requises pour ne pas faire décrocher le moteur lors des inversions de sens de
// rotations. (avec ceci, il est possible de diminuer le délais entre pulse à haute vitesse ce
// qui augmente la vitesse) Comme la vitesse est rapide la vitesse est alors lue après un cycle
// complet de va-et-vient. Pour simplifier, la course n'est lue qu'après un cycle complet de va-et-vient.
// Un autre point important est de lire la vitesse souvent à basse vitesse :
// par exemple si la vitesse est au mini et la course est grande, alors cela prendra une éternité
// pour que le va-et-vient se termine jusqu'à la prochaine lecture de vitesse.
// L'accélération et la décélération est linéaire (après un cycle de pulse, le délais est soustrait pour
// l'accélération ou additioné de 1 pour la décélération).
#define step_pin 9 // Pin 9 connected to Steps pin on ST-M5045 ou ... c'est la pin du pulse
// (un pulse c'est un pas en mode full
// ou en mode 1600pas/rev : 8 pulses pour un pas avec un motor de 1.8deg
// ou 200pas/rev)
#define dir_pin 8 // Pin 8 connected to Direction pin
#define home_switch 12 // Pin 12 connected to Home Switch (MicroSwitch)
#define ref 0 // c'est le 0 ici l'inversion est faite en mode basse vitesse
// (sans accélération ni décélération)
//****************************************************************************************************
//**********************PARAMETRES MODIFIABLES********************************************************
#define v_max 40 // C'est la vitesse maximale lue par le potentiomètre de vitesse (délai en
// microseconde entre deux pulses) 30 50 45 55 65 70 65 Valeur original 50.
#define v_min 1200 // C'est la vitesse minimum lue par le potentiomètre de vitesse (délai en
// microseconde entre deux pulses)
#define v_max_inv 200 // C'est la vitesse maximale à laquelle le moteur ne décroche pas 200 280
// Valeur précédente=200 à l'inversion de sens de rotation (200 pour Gecko
// et 200 pour 1600pas/rev?). En dessous de cette vitesse, l'accélération
// et la décélération ne sont pas requise. C'est pourquoi la course peut être
// plus petite car il n'y pas besoin de distance de freinage. A cette petite
// course le va-et-vient est tellement rapide que ça vibre. On retrouve ici
// le mode vibro.
#define course_max 2968 // C'est la course maximale lue par le potentiomètre de course 2150 2125
// 2100 2080 origine 2320 2500 Cette valeur dépende de la longueur de la
// machine.
#define marge 30 // C'est la marge ou décalage de la référence par rapport à la position du
// bras à la mise sous tension de la machine en principe en butée du coté
// vert ou coté rouge. Ceci assure que la partie mobile ne viennent cogné
// sur l'un des cotés. Valeur originale = 50.
//*****************************************************************************************************
int course_min = 296; // C'est la course minimum lue par le potentiomètre de course. Qui corresond
// à la course minimum pour l'accélération et la décélération à haute vitesse.
// (vitesse à laquelle la distance de freinage/accélération est requise).
// Soit course_min > 2*(v_max_inv - v_max) = distance max de freinage ou
// d'accélération.
// Si on est dans le mode basse vitesse alors on peut réduire la course pour
// le mode vibro.
int diff_course = 1200; // C'est la tolérance d'une différence de course. Cette valeur est utilisée pour
// comparer la valeur précédente de la course (customCourseMapped_pre) et la
// valeur courante. S'il y avait un problème de mesure du poto cela évite que
// la course se mette au max, ce qui pourrait être dangereux.
int x=v_max_inv; // Variable de délai entre impulsion qui varie selon accéleration et décélération
int steps=0; // Variable compteur de pas. Sert à savoir la position du bras (position courante)
int steps_init=0; // Variable compteur de pas. Pour la prise de référence à l'initialisation
int analog_read_counter = 300; // Permet de pas lire trop souvent la vitesse du potentiometre. Ce qui permet
// une vitesse plus élevée du va-et-vient.
int customCourseMapped; // Pour stocker la consigne de la course courante
int customCourseMapped_pre; // Pour stocker la consigne de la course précédente (pour controler que la diff
// n'est pas trop grande (sécurité)
int customSpeedMapped; // Pour stocker la consigne de la vitesse
int dist_frein = v_max_inv-v_max; // C'est la vitesse de freinage. On initialise à la valeur max (quand la vitesse est la plus grande)
bool CoteVert = false; // Pour définir le côté vert avec les potos
bool CoteRouge = false; // Pour définir le côté rouge avec les potos
bool CoteMilieu = false; // Pour définir l'utilisation à deux de la machine (les bras se mettent au milieux.
void setup() {
pinMode(dir_pin, OUTPUT);
pinMode(step_pin, OUTPUT);
digitalWrite(dir_pin, LOW);
digitalWrite(step_pin, LOW);
//Serial.begin(9600);
pinMode(home_switch, INPUT_PULLUP);
delay(1000); // on attend un peu
steps=-marge; // on rajoute un poil de cul plié en quatre pour que le 0 soit un peu plus loin
// on aura, avant la mise sous tension de la machine, poussé le bras en butée à
// l'intérieur de la machine du côté vert ou rouge (côté duquel on veut se mettre)
//*******************************************************************************************
// ici on vérifie la position des potos afin de savoir de quel côté la machine est utilisée.
//*******************************************************************************************
//ici la machine est utilisée du côté vert
if(speedUp() > 1100 && course() < 400){
CoteVert = true;
CoteRouge = false;}
//ici la machine est utilisée du côté rouge
if(speedUp() < 100 && course() > 2600){
CoteRouge = true;
CoteVert = false;
}
//ici la machine est utilisée sur les deux côtés à la fois
if((speedUp() > 400 && speedUp() < 800) && (course() > 1290 && course() < 2090)){
CoteMilieu = true;
CoteVert = false;
CoteRouge = false;
}
if(CoteMilieu){
while(steps<(course_max/2)){ // va jusqu'au milieu
digitalWrite(step_pin, HIGH);
delay(1);
digitalWrite(step_pin, LOW);
delay(1);
steps++;
}
}
// tant que le potentiomètre de la vitesse et de la course ne sont pas au minimum, on ne démarre pas (pour la sécurité)
while (!(speedUp() > (v_min - 30) && course() < 400)){
}
}
void loop() {
customSpeedMapped =speedUp(); // lecture de la vitesse
customCourseMapped = course(); // lecture de la course
if (((customCourseMapped-customCourseMapped_pre) > diff_course) && (customSpeedMapped < 200)) {
while(1){} // On rentre en boucle infinie (pour la sécurité évite de se faire percer trop violemment)
}
//*********************************************Ne sait pas trop ce que ça fait?**************************
while ((customSpeedMapped) > (v_min - 17)){ // si le potentiomètre de la vitesse est au minimum,
//on met LM42P à l'arrêt
if (analog_read_counter > 0) { //pour ne pas lire trop souvent le pot de la vitesse
analog_read_counter--;
}
else {
analog_read_counter = 400;
customSpeedMapped =speedUp(); // permet de modifier la vitesse sans devoir attendre un va complet
}
}
//*********************************************************************************************************
if(CoteVert){
if(customSpeedMapped<v_max_inv){
dist_frein = v_max_inv-customSpeedMapped; // On recalcule la distance de freinage pour la vitesse de consigne actuelle.
course_min = 380; //course min plus grande // Plus la vitesse est élévée et plus la distance de freinage est longue.
} // Rappel : une valeur petite pour la vitesse signifie une grande vitesse
// puisque la valeur est le délai en microsecondes entre-pulse
else{course_min = 30;} // fonction vibro à basse vitesse
// customCourseMapped = course(); // on lit la course en fonction vibro ou pas***********************
digitalWrite(dir_pin, LOW);
if (customSpeedMapped>200) { // Mode basse vitesse. Ici l'accélération et la décélération ne sont pas requise.
while(steps<customCourseMapped){ // va jusqu'à course
digitalWrite(step_pin, HIGH);
delayMicroseconds(customSpeedMapped);
digitalWrite(step_pin, LOW);
delayMicroseconds(customSpeedMapped);
steps++;
//Serial.println(steps);
// We only want to read the pot every so often (because it takes a long time we don't
// want to do it every time through the main loop).
if (analog_read_counter > 0) {
analog_read_counter--;
}
else {
analog_read_counter = 300;
customSpeedMapped =speedUp(); // permets de modifier la vitesse sans devoir attendre un va complet
}
}
digitalWrite(dir_pin, HIGH); //changement de direction et va jusqu'à la référence 0
while(steps>ref){
digitalWrite(step_pin, HIGH);
delayMicroseconds(customSpeedMapped);
digitalWrite(step_pin, LOW);
delayMicroseconds(customSpeedMapped);
steps--;
//Serial.println(steps);
// We only want to read the pot every so often (because it takes a long time we don't
// want to do it every time through the main loop).
if (analog_read_counter > 0) {
analog_read_counter--;
}
else {
analog_read_counter = 300;
customSpeedMapped =speedUp(); // permets de modifier la vitesse sans devoir attendre un va complet
}
}
}
else{
// ici la vitesse rapide est activée et l'accélération et la décélértion est requise
digitalWrite(dir_pin, LOW);
//accélération et va jusqu'à course
while(steps<(customCourseMapped-dist_frein)){ // On doit réduire la course pour laisser de la distance au freinage
digitalWrite(step_pin, HIGH);
delayMicroseconds(x);
digitalWrite(step_pin, LOW);
delayMicroseconds(x);
//Serial.println(steps);
if(x>customSpeedMapped) x--; // tant que x est plus grand (plus x est grand plus la vitesse est lente) que la vitesse du poto, on accélère
steps++;
}
// Là on a atteint la course - la distance de freinage
//décélération
while (x<v_max_inv){
digitalWrite(step_pin, HIGH);
delayMicroseconds(x);
digitalWrite(step_pin, LOW);
delayMicroseconds(x);
//Serial.println(steps);
if(x<v_max_inv) x++;
steps++; //on doit continuer à incrémenter car ça continue à avancer
}
digitalWrite(dir_pin, HIGH); //Changement de direction
while(steps>(ref+dist_frein)){ // Acccélération et va jusqu'à la référence + distance de freinage.
digitalWrite(step_pin, HIGH);
delayMicroseconds(x);
digitalWrite(step_pin, LOW);
delayMicroseconds(x);
//Serial.println(steps);
if(x>customSpeedMapped) x--;
steps--;
}
while(x<(v_max_inv)){ //décélération
digitalWrite(step_pin, HIGH);
delayMicroseconds(x);
digitalWrite(step_pin, LOW);
delayMicroseconds(x);
//Serial.println(steps);
if(x<v_max_inv) x++;
steps--;
}
//*/
}
//steps=steps+2; //pour compenser je ne sais pas quoi? pour le petit driver il faut mettre +2 et rien pour le grand (commenter)
}
if(CoteRouge){
if(customSpeedMapped<v_max_inv){
dist_frein = v_max_inv-customSpeedMapped; // On recalcule la distance de freinage pour la vitesse de consigne actuelle.
course_min = 380; //course min plus grande // Plus la vitesse est élévée et plus la distance de freinage est longue.
} // Rappel : une valeur petite pour la vitesse signifie une grande vitesse
// puisque la valeur est le délai en microsecondes entre-pulse
else{course_min = 30;} // fonction vibro à basse vitesse
//customCourseMapped = course(); // on lit la course en fonction vibro ou pas*******************************
digitalWrite(dir_pin, HIGH);
if (customSpeedMapped>200) { // Mode basse vitesse. Ici l'accélération et la décélération ne sont pas requise.
while(steps<customCourseMapped){ // va jusqu'à course
digitalWrite(step_pin, HIGH);
delayMicroseconds(customSpeedMapped);
digitalWrite(step_pin, LOW);
delayMicroseconds(customSpeedMapped);
steps++;
//Serial.println(steps);
// We only want to read the pot every so often (because it takes a long time we don't
// want to do it every time through the main loop).
if (analog_read_counter > 0) {
analog_read_counter--;
}
else {
analog_read_counter = 300;
customSpeedMapped =speedUp(); // permets de modifier la vitesse sans devoir attendre un va complet
}
}
//*
digitalWrite(dir_pin, LOW); //changement de direction et va jusqu'à la référence 0
while(steps>ref){
digitalWrite(step_pin, HIGH);
delayMicroseconds(customSpeedMapped);
digitalWrite(step_pin, LOW);
delayMicroseconds(customSpeedMapped);
steps--;
//Serial.println(steps);
// We only want to read the pot every so often (because it takes a long time we don't
// want to do it every time through the main loop).
if (analog_read_counter > 0) {
analog_read_counter--;
}
else {
analog_read_counter = 300;
customSpeedMapped =speedUp(); // permets de modifier la vitesse sans devoir attendre un va complet
}
}
}
else{
// ici la vitesse rapide activée et l'accélération et la décélértion est requise
digitalWrite(dir_pin, HIGH);
//accélération et va jusqu'à course
while(steps<(customCourseMapped-dist_frein)){ // On doit réduire la course pour laisser de la distance au freinage
digitalWrite(step_pin, HIGH);
delayMicroseconds(x);
digitalWrite(step_pin, LOW);
delayMicroseconds(x);
//Serial.println(steps);
if(x>customSpeedMapped) x--; // tant que x est plus grand (plus x est grand plus la vitesse est lente) que la vitesse du poto, on accélère
steps++;
}
// Là on a atteint la course - la distance de freinage
//décélération
while (x<v_max_inv){
digitalWrite(step_pin, HIGH);
delayMicroseconds(x);
digitalWrite(step_pin, LOW);
delayMicroseconds(x);
//Serial.println(steps);
if(x<v_max_inv) x++;
steps++; //on doit continuer à incrémenter car ça continue à avancer
}
digitalWrite(dir_pin, LOW); //Changement de direction
while(steps>(ref+dist_frein)){ // Acccélération et va jusqu'à la référence + distance de freinage.
digitalWrite(step_pin, HIGH);
delayMicroseconds(x);
digitalWrite(step_pin, LOW);
delayMicroseconds(x);
//Serial.println(steps);
if(x>customSpeedMapped) x--;
steps--;
}
while(x<(v_max_inv)){ //décélération
digitalWrite(step_pin, HIGH);
delayMicroseconds(x);
digitalWrite(step_pin, LOW);
delayMicroseconds(x);
//Serial.println(steps);
if(x<v_max_inv) x++;
steps--;
}
//*/
}
//steps=steps+2; //pour compenser je ne sais pas quoi? pour le petit driver il faut mettre +2 et rien pour le grand (commenter)
}
if(CoteMilieu){
if(customSpeedMapped<v_max_inv){
dist_frein = v_max_inv-customSpeedMapped; // On recalcule la distance de freinage pour la vitesse de consigne actuelle.
course_min = 380; //course min plus grande // Plus la vitesse est élévée et plus la distance de freinage est longue.
} // Rappel : une valeur petite pour la vitesse signifie une grande vitesse
// puisque la valeur est le délai en microsecondes entre-pulse
else{course_min = 30;} // fonction vibro à basse vitesse
//customCourseMapped = course(); // on lit la course en fonction vibro ou pas**********************
digitalWrite(dir_pin, LOW);
if (customSpeedMapped>200) { // Mode basse vitesse. Ici l'accélération et la décélération ne sont pas requise.
while(steps<((course_max/2)+(customCourseMapped)/2)){ // va jusqu'à course
digitalWrite(step_pin, HIGH);
delayMicroseconds(customSpeedMapped);
digitalWrite(step_pin, LOW);
delayMicroseconds(customSpeedMapped);
steps++;
//Serial.println(steps);
// We only want to read the pot every so often (because it takes a long time we don't
// want to do it every time through the main loop).
if (analog_read_counter > 0) {
analog_read_counter--;
}
else {
analog_read_counter = 300;
customSpeedMapped =speedUp(); // permets de modifier la vitesse sans devoir attendre un va complet
}
}
//*
digitalWrite(dir_pin, HIGH); //changement de direction et va jusqu'à la référence 0
while(steps>((course_max/2)-(customCourseMapped/2))){
digitalWrite(step_pin, HIGH);
delayMicroseconds(customSpeedMapped);
digitalWrite(step_pin, LOW);
delayMicroseconds(customSpeedMapped);
steps--;
//Serial.println(steps);
// We only want to read the pot every so often (because it takes a long time we don't
// want to do it every time through the main loop).
if (analog_read_counter > 0) {
analog_read_counter--;
}
else {
analog_read_counter = 300;
customSpeedMapped =speedUp(); // permets de modifier la vitesse sans devoir attendre un va complet
}
}
}
else{
// ici la vitesse rapide activée et l'accélération et la décélértion est requise
digitalWrite(dir_pin, LOW);
//accélération et va jusqu'à course
while(steps<((course_max/2)+(customCourseMapped/2)-dist_frein)){ // On doit réduire la course pour laisser de la distance au freinage steps<((course_max/2)+(customCourseMapped/2)-dist_frein)
digitalWrite(step_pin, HIGH);
delayMicroseconds(x);
digitalWrite(step_pin, LOW);
delayMicroseconds(x);
//Serial.println(steps);
if(x>customSpeedMapped) x--; // tant que x est plus grand (plus x est grand plus la vitesse est lente) que la vitesse du poto, on accélère
steps++;
}
// Là on a atteint la course - la distance de freinage
//décélération
while (x<v_max_inv){
digitalWrite(step_pin, HIGH);
delayMicroseconds(x);
digitalWrite(step_pin, LOW);
delayMicroseconds(x);
//Serial.println(steps);
if(x<v_max_inv) x++;
steps++; //on doit continuer à incrémenter car ça continue à avancer
}
digitalWrite(dir_pin, HIGH); //Changement de direction
while(steps>((course_max/2)-(customCourseMapped/2)+dist_frein)){ // Acccélération et va jusqu'à la référence + distance de freinage. steps>((course_max/2)-(customCourseMapped/2))
digitalWrite(step_pin, HIGH);
delayMicroseconds(x);
digitalWrite(step_pin, LOW);
delayMicroseconds(x);
//Serial.println(steps);
if(x>customSpeedMapped) x--;
steps--;
}
while(x<(v_max_inv)){ //décélération
digitalWrite(step_pin, HIGH);
delayMicroseconds(x);
digitalWrite(step_pin, LOW);
delayMicroseconds(x);
//Serial.println(steps);
if(x<v_max_inv) x++;
steps--;
}
//*/
}
//steps=steps+2; //pour compenser je ne sais pas quoi? pour le petit driver il faut mettre +2 et rien pour le grand (commenter)
}
customCourseMapped_pre = customCourseMapped; //pour la calcul de la diff (sécurité)
}
// Function for reading the Potentiometer
int speedUp() {
int customSpeed = analogRead(A0); // Reads the potentiometer
int newCustom = map(customSpeed, 1023, 0, v_max,v_min);
return newCustom;
}
int course() {
int customCourse = analogRead(A1); // Reads the potentiometer
int newCustom2 = map(customCourse, 1023, 0, course_max,course_min);
return newCustom2;
}
CodeGeckoAccelStepVx.ino¶
Note
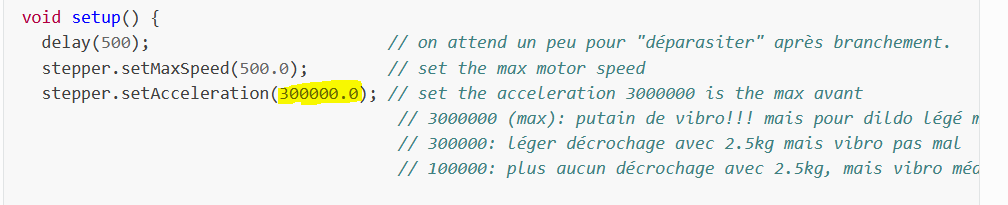
For a better vibro you can adjust that parameter stepper.setAcceleration(….):
3000000 is the fastest acceleration for a strong vibro but for light dildo ;
300000 for up to 2kg dildo ;
100000 for heavier dildos.
// CodeGeckoAccelStepV1.ino
// V1: Version de base
// Auteur: LM42P
// Date: 4 july 2022
// Driver used: Geckodrive G201X
// Motor: Stepper Motor NEMA 23 23HS11240
// Arduino: Arduino Uno
//
// Ce programme utilise la librairie AccelStepper pour un changement de sens plus doux. Il supprime
// le saut de vitesse par rapport au CodeGeckoVx.ino, au détriment du vitesse plus faible.
#include <AccelStepper.h> // Load the AccelStepper library
// direction Digital 8 (CCW), pulses Digital 9 (CLK)
AccelStepper stepper(1, 9, 8);
//****************************************************************************************************
//**********************PARAMETRES MODIFIABLES********************************************************
#define v_max 5000 // C'est la vitesse maximale lue par le potentiomètre de vitesse. Peut être
// descendue à 4800, car il y un bout vers la fin qui ne va pas plus vite.
#define v_min 120 // C'est la vitesse minimum lue par le potentiomètre de vitesse.
#define course_max_physique 3044 // C'est la course maximale physique de la machine (butée à butée
// sans jeu). Cette valeur a été détérminée par la programme setFullStroke.
#define course_max course_max_physique-2*marge // C'est la valeur de la course effective (tenant
// compte des marges. Cette valeur sert à mapper le potentiomètre
// de course.
// |<------------------------------------course_max_physique------------------------------->|
// |<--marge-->|<-----------------------------course_max----------------------->|<--marge-->|
// |<-->| |<-->|
// course_min course_min
// |<--marge-->|<---------course_max/2--------->|<---------course_max/2-------->|<--marge-->|
// |<->|<->|
// course_min/2 course_min/2
#define course_min 40 // c'est la course minimum pour que le vibro soit efficace. Une valeur trop
// petite donnera des amplitudes de variation trop petites.
#define marge 15 // C'est la marge ou décalage de la référence par rapport à la position du
// bras à la mise sous tension de la machine en butée soit du coté vert ou
// rouge. Ceci assure que la partie mobile ne viennent cogné sur l'un des
// cotés. J'ai baissé cette valeur de 30 à 15, pour profiter de la course
// au max.
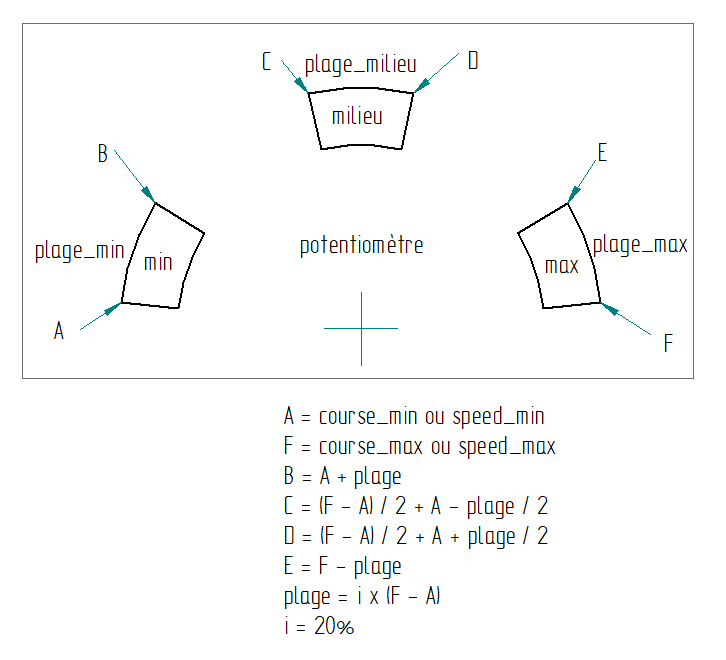
// Points définissant les plages sur les potentiomètres (voir schéma):
#define i 0.2 // facteur de dimensionnement de la plage
#define A_course course_min // on met une marge de 10 pour être sûr que l'on soit dans la plage
// en butée
#define B_course A_course+plage_course
#define C_course (F_course-A_course)/2+A_course-plage_course/2
#define D_course (F_course-A_course)/2+A_course+plage_course/2
#define E_course F_course-plage_course
#define F_course course_max // on met une marge de 10 pour être sûr que l'on soit dans la plage
// en butée
#define plage_course i*(F_course-A_course)
bool plage_min_course=false;
bool plage_milieu_course=false;
bool plage_max_course=false;
#define A_vitesse v_min // on met une marge de 10 pour être sûr que l'on soit dans la plage
// en butée
#define B_vitesse A_vitesse+plage_vitesse
#define C_vitesse (F_vitesse-A_vitesse)/2+A_vitesse-plage_vitesse/2
#define D_vitesse (F_vitesse-A_vitesse)/2+A_vitesse+plage_vitesse/2
#define E_vitesse F_vitesse-plage_vitesse
#define F_vitesse v_max // on met une marge de 10 pour être sûr que l'on soit dans la plage
// en butée
#define plage_vitesse i*(F_vitesse-A_vitesse)
bool plage_min_vitesse=false;
bool plage_milieu_vitesse=false;
bool plage_max_vitesse=false;
bool CoteVert = false; // Pour définir le côté vert avec les potos
bool CoteRouge = false; // Pour définir le côté rouge avec les potos
bool Milieu = false; // Pour définir l'utilisation à deux de la machine
// (les bras se mettent au milieu)
int cours=0; // C'est la course
int customSpeedMapped = 5; // Pour stocker la consigne de la vitesse
int analog_read_counter = 300; // Compteur est utilisé pour ne de pas lire la vitesse du potentiometre
// trop souvent. Ce qui permet une vitesse plus élevée du va-et-vient
// et évite les parasites.
void setup() {
delay(500); // on attend un peu pour "déparasiter" après branchement.
stepper.setMaxSpeed(500.0); // set the max motor speed
stepper.setAcceleration(300000.0); // set the acceleration 3000000 is the max avant
// 3000000 (max): putain de vibro!!! mais pour dildo légé max 800g
// 300000: léger décrochage avec 2.5kg mais vibro pas mal
// 100000: plus aucun décrochage avec 2.5kg, mais vibro médiocre
//*******************************************************************************************
// Ici on vérifie la position des potensiomètres pour savoir de quel côté la machine
// est utilisée. (voir schéma)
//*****************************************************************************************
//Le curseur de potentiomètre de la course est dans la plage min
if (course()>=A_course-10 && course()<B_course){
plage_min_course=true;
plage_milieu_course=false;
plage_max_course=false;
}
//Le curseur de potentiomètre de la course est dans la plage milieu
else if (course()>C_course && course()<D_course){
plage_min_course=false;
plage_milieu_course=true;
plage_max_course=false;
}
//Le curseur de potentiomètre de la course est dans la plage max
else if (course()>E_course && course()<=F_course+10){ //+10 plage plus grande
plage_min_course=false;
plage_milieu_course=false;
plage_max_course=true;
}
else {
plage_min_course=false;
plage_milieu_course=false;
plage_max_course=false;
}
//Le curseur de potentiomètre de la vitesse est dans la plage min
if (speedUp()>=A_vitesse-10 && speedUp()<B_vitesse){ //-10 plage plus grande
plage_min_vitesse=true;
plage_milieu_vitesse=false;
plage_max_vitesse=false;
}
//Le curseur de potentiomètre de la vitesse est dans la plage milieu
else if (speedUp()>C_vitesse && speedUp()<D_vitesse){
plage_min_vitesse=false;
plage_milieu_vitesse=true;
plage_max_vitesse=false;
}
//Le curseur de potentiomètre de la vitesse est dans la plage max
else if (speedUp()>E_vitesse && speedUp()<=F_vitesse+10){ //+10 plage plus grande
plage_min_vitesse=false;
plage_milieu_vitesse=false;
plage_max_vitesse=true;
}
else {
plage_min_vitesse=false;
plage_milieu_vitesse=false;
plage_max_vitesse=false;
}
//ici la machine est utilisée du côté vert
if(plage_min_course && plage_min_vitesse){
CoteVert = true;
Milieu = false;
CoteRouge = false;
}
//ici la machine est utilisée sur les deux côtés à la fois
else if(plage_milieu_course && plage_milieu_vitesse){
CoteVert = false;
Milieu = true;
CoteRouge = false;
}
//ici la machine est utilisée du côté rouge
else if(plage_max_course && plage_max_vitesse){
CoteVert = false;
Milieu = false;
CoteRouge = true;
}
else{
CoteVert = false;
Milieu = false;
CoteRouge = false;
}
// on met les bonnes références suivant le côté voulu
//ici la machine est utilisée du côté vert
if(CoteVert){
// On référence la position à marge (pour laisser de la place à la butée)
stepper.setCurrentPosition(marge);
// On se déplace à 0.
stepper.moveTo(0);
while (!stepper.distanceToGo() == 0) {
stepper.run();
}
}
//ici la machine est utilisée sur les deux côtés à la fois (potentiomètres au milieu)
else if(Milieu){
// On référence la position à marge (pour laisser de la place à la butée)
stepper.setCurrentPosition(course_max_physique/2);
// On se déplace à 0
stepper.moveTo(0);
while (!stepper.distanceToGo() == 0) {
stepper.run();
}
}
//ici la machine est utilisée du côté rouge
else if(CoteRouge){
//On reset la position à -marge (pour laisser de la place à la butée)
stepper.setCurrentPosition(-marge);
// On se déplace à 0.
stepper.moveTo(0);
while (!stepper.distanceToGo() == 0) {
stepper.run();
}
}
// Tant que le potentiomètre de la vitesse et de la course ne sont pas au minimum, on ne
// démarre pas (pour la sécurité)
while (!(speedUp() < (v_min + 30) && course() < course_min+100)){}
} //fin du setup
void loop() {
//*********si le potentiomètre de la vitesse est au minimum, on met LM42P à l'arrêt**************
while ((customSpeedMapped) < (v_min +7)){
if (analog_read_counter > 0) { //pour ne pas lire trop souvent le pot de la vitesse
analog_read_counter--;
}
else {
analog_read_counter = 300;
customSpeedMapped =speedUp();
}
} // fin de la boucle while //mettre la machine à l'arrêt
// on règle la vitesse de la machine
if (analog_read_counter > 0) { //pour ne pas lire le pot de la vitesse trop souvent et évite les parasites
analog_read_counter--;
}
else {
analog_read_counter = 300;
customSpeedMapped =speedUp();
stepper.setMaxSpeed(customSpeedMapped); // permet de modifier la vitesse sans devoir attendre
// un va-et-vient complet
} // fin on règle la vitesse de la machine
if(CoteVert){ // si la machine est utilisée du côté vert
// If the stepper isn't moving and doesn't have to go any distance
if (!stepper.isRunning() && stepper.distanceToGo() == 0) {
stepper.moveTo(-cours);
if (cours>0){
cours=0;
}
else cours=course();
}
}
else if(Milieu){ // si la machine est utilisée des deux côtés à la fois
// If the stepper isn't moving and doesn't have to go any distance
if (!stepper.isRunning() && stepper.distanceToGo() == 0) {
stepper.moveTo(cours);
cours=(-1*cours);
if (cours>=0){
cours=course()/2;
}
}
}
else if(CoteRouge){ // si la machine est utilisée du côté rouge
// If the stepper isn't moving and doesn't have to go any distance
if (!stepper.isRunning() && stepper.distanceToGo() == 0) {
stepper.moveTo(cours);
if (cours>0){
cours=0;
}
else cours=course();
}
}
stepper.run();
} //fin de la boucle principale
// Function for reading the Potentiometer
int speedUp() {
int customSpeed = analogRead(A0); // Reads the potentiometer
int newCustom = map(customSpeed, 0, 1023, v_min,v_max);
return newCustom;
}
int course() {
int customCourse = analogRead(A1); // Reads the potentiometer
int newCustom2 = map(customCourse, 0, 1023, course_min, course_max);
return newCustom2;
}
Updates¶
V3 -> V4 : In the V3 when the RJ45 (Remote Control) is pull out during full speed, the stroke goes to its max, this could be dangerous. V4 avoid this and a reset is necessarily when it happens. Also V4 doesn’t permit a too much high gradient of stroke change.
V4->V5 : V4->V5 stroke_min has been set to 296 instead of 380 allows maybe to have a better vibro
V1: first version
How to update the Latest Firmware¶
This video helps to understand how to update Firmware :
Download and install Arduino IDE software
Connect LM42P with a usb cable
Open Arduino IDE
File New
Delete what is in the file
Copy / paste the latest code from LM42P site
Click compile button there should be no error
Click upload button
Note
If there is a error during uploading then you should try to select the good Port. Go to Tools -> Ports If Ports is grey then try to put another arduino the port should not be grey. Then put the arduino you wanted to update.